Go2 Edu Plus con D1 Arm
Caratteristiche Tecniche
- Dimensioni in posizione eretta: 70×31×40 cm
- Dimensioni in posizione accovacciata: 76×31×20 cm
- Peso (con batteria): Circa 15 kg
- Materiale: Lega di alluminio + Plastica tecnica ad alta resistenza
- Tensione: 28V ~ 33.6V
- Potenza massima operativa: Circa 3000W
- Payload (Carico utile): ≈8kg (MAX ~ 10kg)
- Velocità: 0 ~ 3.7 m/s (MAX ~ 5 m/s)
- Altezza massima ostacolo superabile: Circa 16 cm
- Angolo massimo di salita: 40°
- Potenza di calcolo di base: CPU 8-core ad alte prestazioni
- Coppia massima articolazione principale: Circa 45N·m
- Motore articolazione ginocchio in alluminio: 12 unità
- Campo di movimento "Corpo: -48°~48° Coscia: -200°~90° Gamba: -156°~-48°"
- Circuito interno articolazione (ginocchio)
- Camera: Realsense D435i Camera
- Computing Power: 40 Tops o 100 Tops
- Raffreddamento a heat pipe per articolazione
- LiDAR 3D ultra-grandangolare
- Modulo di tracciamento vettoriale wireless
- Fotocamera grandangolare HD
- Sensore di forza al piede
- Movimenti di base
- Programmabile: ROS2, Python, C++
- OTA intelligente avanzato
- Trasmissione immagini RTT 2.0
- Programmazione grafica
- Luce frontale
- WiFi6 dual-band
- Bluetooth 5.2 / 4.2 / 2.1
- Modulo 4G
- Funzioni vocali (offline, comandi, interfono, musica)
- Sistema ISS 2.0 di affiancamento intelligente
- Rilevamento intelligente e evitamento ostacoli
- Compatibilità con stazione di ricarica
- Controller manuale
- Modulo ad alte prestazioni di calcolo; NVIDIA Jetson Orin (opzionale)
- Batteria intelligente: lunga durata (15000 mAh)
- Autonomia: Circa 2-4 ore
- Caricatore: Ricarica rapida (33.6V 9A)
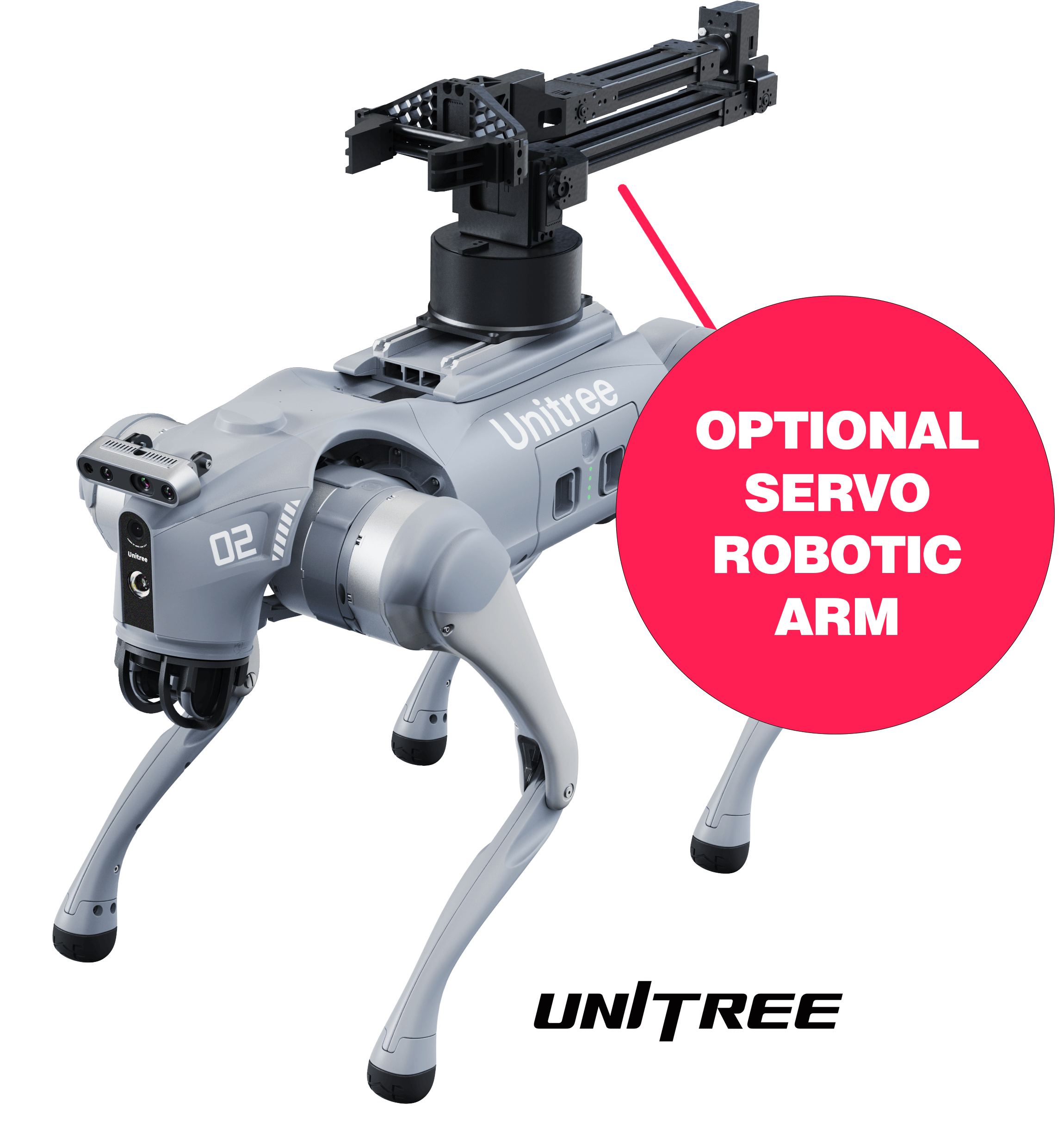
- Gradi di libertà del braccio: 6
- Carico del braccio: 500g (peso ideale)
- Apertura massima del braccio: 600 mm (escludendo la lunghezza delle pinze, soggetta a piccole variazioni per eventuali modifiche strutturali); 715 mm (includendo la lunghezza delle pinze, eventuali modifiche strutturali possono comportare piccole variazioni)
- Alimentazione del braccio richiesta: 24V 2.5A (MAX 5A)
- Interfaccia del braccio: DC5.5-2.1
- Potenza del braccio: 60W
- Interfaccia di controllo del braccio: interfaccia di comunicazione RJ45 (ETH)
- Parametri delle articolazioni del braccio: J1 ±135°,J2 ±90°,J3 ±90°,J4 ±135°,J5 ±90°,J6 ±135°
- Tutte le docking station (sia da 40 che da 100 Tops) includono di serie algoritmi per la fotocamera di profondità e per il braccio robotico D1.
- Dopo l'adattamento, il movimento del braccio robotico può essere controllato tramite l'app (nota: non è possibile utilizzare il telecomando fisico per il controllo).
Tag
GO2